
服务电话:
400-996-7896
CONTACT US
联系我们由于自动上下料机器人手臂运动为直线运动,且考虑到搬运工件的重量较大,以及机器人的动态性能及运动的稳定性,安全性和较高的刚度要求,因此选择液压驱动方式,通过液压缸的直接驱动,液压缸既是驱动元件,又是执行运动件,因此不用再额外设计执行件,而且液压缸实现直线运动,控制简单,易于实现计算机的控制。
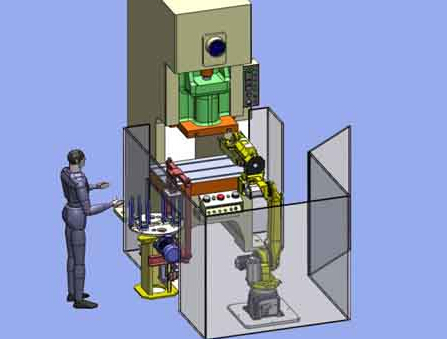
自动上下料机器人的动作有腰座的旋转、垂直手臂的升降、水平手臂的伸缩及手爪的夹紧与松开。手臂垂直升降和水平伸缩由液压实现驱动;手爪的夹紧与放松,通过柱塞缸与齿轮来实现;腰座旋转通过步进电动机与齿轮来实现。
实现执行手爪夹紧与放松的柱塞缸,由单线圈的电磁阀(夹紧电磁阀)来控制,当线圈不通电时,柱塞缸不工作,当线圈通电时,柱塞缸工作冲程,手爪张开,柱塞缸工作回程,手爪闭合。
当自动上下料机器人旋转到机床上方,并准备下降进行上下料工作时,为了确保安全,必须在机床停止工作并发出上下料命令时,才允许机器人下降进行作业,同时,从工件料架上抓取工件时,也要先判断料架上有无工件可取。


微信公众平台

鲁公网安备 37021302000580号
网站地图 技术支持:知道网络